Потенциальное поле
Смотреть что такое «Потенциальное поле» в других словарях:
потенциальное поле — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия EN potential field … Справочник технического переводчика
потенциальное поле — potencialinis laukas statusas T sritis Standartizacija ir metrologija apibrėžtis Potencialinės jėgos, išreikštos skaliarine funkcija – potencialo gradientu, laukas, pvz., elektrostatinis laukas. atitikmenys: angl. potential field vok.… … Penkiakalbis aiškinamasis metrologijos terminų žodynas
потенциальное поле — potencialinis laukas statusas T sritis Standartizacija ir metrologija apibrėžtis Skaliarinio potencialo laukas. atitikmenys: angl. potential field vok. Potentialfeld, n rus. потенциальное поле, n pranc. champ potentiel, m … Penkiakalbis aiškinamasis metrologijos terminų žodynas
потенциальное поле — potencialinis laukas statusas T sritis fizika atitikmenys: angl. potential field vok. potenzielles Feld, n rus. потенциальное поле, n pranc. champ potentiel, m … Fizikos terminų žodynas
Потенциальное поле — Потенциальное (или безвихревое) векторное поле в математике векторное поле, которое можно представить как градиент некоторой скалярной функции координат (потенциала). Необходимым условием потенциальности векторного поля в трёхмерном пространстве … Википедия
векторное потенциальное поле — vektorinis potencialinis laukas statusas T sritis radioelektronika atitikmenys: angl. vector potential field vok. Potentialfeld, n; Vektorpotentialfeld, n rus. векторное потенциальное поле, n pranc. champ vectoriel à potentiel, m … Radioelektronikos terminų žodynas
векторное потенциальное поле — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия EN vector potential field … Справочник технического переводчика
Потенциальное векторное поле — Потенциальное (или безвихревое) векторное поле в математике векторное поле, которое можно представить как градиент некоторой скалярной функции координат (потенциала). Необходимым условием потенциальности векторного поля в трёхмерном… … Википедия
потенциальное силовое поле — Силовое поле, для которого существует силовая функция. Примечание. Силы в этом силовом поле называются потенциальными силами. [Сборник рекомендуемых терминов. Выпуск 102. Теоретическая механика. Академия наук СССР. Комитет научно технической… … Справочник технического переводчика
Потенциальное поле
Потенциальное (или безвихревое) векторное поле в математике — векторное поле, которое можно представить как градиент некоторой скалярной функции координат (потенциала). Необходимым условием потенциальности векторного поля в трёхмерном пространстве является равенство нулю ротора поля. Однако это условие не является достаточным (например, в многосвязной области у безвихревого поля может не существовать скалярный потенциал).
В физике, имеющей дело с силовыми полями, математическое условие потенциальности силового поля можно представить как требование равенства нулю работы при перемещении частицы, на которую действует поле, по замкнутому контуру. В качестве потенциала поля в этом случае можно выбрать работу по перемещению пробной частицы из некоторой произвольно выбранной исходной точки в заданную точку (по определению эта работа не зависит от пути перемещения). Например, потенциальными являются статическое электрическое поле, а также гравитационное поле в ньютоновой теории гравитации.
См. также
Смотреть что такое «Потенциальное поле» в других словарях:
потенциальное поле — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия EN potential field … Справочник технического переводчика
потенциальное поле — potencialinis laukas statusas T sritis Standartizacija ir metrologija apibrėžtis Potencialinės jėgos, išreikštos skaliarine funkcija – potencialo gradientu, laukas, pvz., elektrostatinis laukas. atitikmenys: angl. potential field vok.… … Penkiakalbis aiškinamasis metrologijos terminų žodynas
потенциальное поле — potencialinis laukas statusas T sritis Standartizacija ir metrologija apibrėžtis Skaliarinio potencialo laukas. atitikmenys: angl. potential field vok. Potentialfeld, n rus. потенциальное поле, n pranc. champ potentiel, m … Penkiakalbis aiškinamasis metrologijos terminų žodynas
потенциальное поле — potencialinis laukas statusas T sritis fizika atitikmenys: angl. potential field vok. potenzielles Feld, n rus. потенциальное поле, n pranc. champ potentiel, m … Fizikos terminų žodynas
Потенциальное поле — консервативное поле, векторное поле, циркуляция которого вдоль любой замкнутой траектории равна нулю. Если П. п. силовое поле, то это означает равенство нулю работы сил поля вдоль замкнутой траектории. Для П. п. а (М) существует такая… … Большая советская энциклопедия
векторное потенциальное поле — vektorinis potencialinis laukas statusas T sritis radioelektronika atitikmenys: angl. vector potential field vok. Potentialfeld, n; Vektorpotentialfeld, n rus. векторное потенциальное поле, n pranc. champ vectoriel à potentiel, m … Radioelektronikos terminų žodynas
векторное потенциальное поле — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия EN vector potential field … Справочник технического переводчика
Потенциальное векторное поле — Потенциальное (или безвихревое) векторное поле в математике векторное поле, которое можно представить как градиент некоторой скалярной функции координат (потенциала). Необходимым условием потенциальности векторного поля в трёхмерном… … Википедия
потенциальное силовое поле — Силовое поле, для которого существует силовая функция. Примечание. Силы в этом силовом поле называются потенциальными силами. [Сборник рекомендуемых терминов. Выпуск 102. Теоретическая механика. Академия наук СССР. Комитет научно технической… … Справочник технического переводчика
Потенциальность электростатического поля
Потенциальное (консервативное) поле − это поле, в котором работа при перемещении зависит только лишь от конечной и начальной точки пути и не зависит от траектории движения тела.
Что такое потенциальное поле
Есть и другое абсолютно равнозначное определение потенциальности поля (консервативной силы).
Известно, что сила гравитации F G
На основе принципа суперпозиции из потенциальности поля точечного заряда следует потенциальность произвольного электростатического поля.
Легко докажем это математически. Циркуляция вектора напряженности поля точечного заряда E i → по любому замкнутому контуру равняется 0 :
Если поле создает N точечных зарядов, тогда по принципу суперпозиции результирующее поле находим как:
Что такое ротор. Практические задачи
Ротор − это вектор, проекция которого на направление единичного вектора n → определяется таким образом:
Обращаем внимание, что в формуле большой буквой S обозначена площадь, а маленькой буквой s − линейное перемещение.
Ротор описывает интенсивность «завихрения» вектора. На практике при вычислении ротора применяют следующие формулы:
Независимость работы от пути перемещения заряда в электростатическом поле выражается формулой:
где L 1 и L 2 − это различные пути между точками А и В . При замене местами пределов интегрирования получаем:
Выражение ∫ A L 1 B E → · d s → = ∫ A L 2 B E → · d s → представим в виде:
к уравнению выше, получаем:
Это дифференциальная формулировка потенциальности электростатического поля.
Необходимо найти r o t n υ → для точек оси вращения, если υ → − это вектор скорости точек твердого тела, вращающегося с угловой скоростью ω вокруг оси коллинеарной n →
Решение
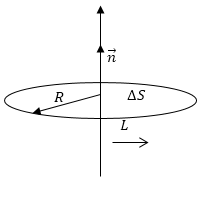
В качестве контура L выберем окружность радиусом R с центром на оси вращения, перпендикулярную оси (рисунок 1 ). Известно, что:
где ∮ d s = 2 π R − это длина окружности.
Необходимо доказать, что из условия потенциальности поля следует: тангенциальные составляющие напряженности электростатического поля непрерывны.
Решение
Поскольку электростатическое поле потенциально, тогда выполняется равенство:
Тангенциальные составляющие − это касательные к произвольной поверхности в любой ее точке. Непрерывность значит, что значения касательных составляющих напряженности одинаковы по обеим сторонам поверхности.
Потенциальное векторное поле
Из Википедии — свободной энциклопедии
Потенциальное (или безвихревое) векторное поле в математике — векторное поле, которое можно представить как градиент некоторой скалярной функции координат. Необходимым условием потенциальности векторного поля в трёхмерном пространстве является равенство нулю ротора поля. Однако это условие не является достаточным — если рассматриваемая область пространства не является односвязной, то скалярный потенциал может быть многозначной функцией.
В физике, имеющей дело с силовыми полями, математическое условие потенциальности силового поля можно представить как требование равенства нулю работы при мгновенном перемещении частицы, на которую действует поле, по замкнутому контуру. Этот контур не обязан быть траекторией частицы, движущейся под действием только данных сил. В качестве потенциала поля в этом случае можно выбрать работу по мгновенному перемещению пробной частицы из некоторой произвольно выбранной исходной точки в заданную точку (по определению эта работа не зависит от пути перемещения). Например, потенциальными являются статическое электрическое поле, а также гравитационное поле в ньютоновой теории гравитации.
В некоторых источниках потенциальным полем сил считается только поле с потенциалом, не зависящим от времени. Это связано с тем, что потенциал для сил, зависящий от времени, вообще говоря, не является потенциальной энергией тела, движущегося под действием этих сил. Поскольку силы совершают работу не одномоментно, работа сил над телом будет зависеть от его траектории и от скорости прохождения по ней. В этих условиях сама потенциальная энергия не определена, так как по определению должна зависеть только от положения тела, но не от пути. Тем не менее, и для этого случая потенциал для сил может существовать, и может входить в уравнения движения так же, как и потенциальная энергия для тех случаев, когда она существует.
Для поля сил и потенциала сил эта же формула записывается как
∫ P v → ⋅ d r → = ϕ ( B ) − ϕ ( A ) <\displaystyle \int _
<\vec  ,
,
Интеграл по замкнутому контуру обращается в 0, поскольку начальная и конечная точка совпадают. И наоборот, предыдущую формулу можно вывести из этой, если разбить замкнутый контур на два незамкнутых.
На языке дифференциальных форм потенциальное поле — это точная 1-форма — то есть форма, которая является (внешним) дифференциалом 0-формы (функции). Градиенту соответствует взятие внешнего дифференциала от 0-формы (потенциала), ротору соответствует взятие внешнего дифференциала от 1-формы (поля). Необходимое условие следует из того, что второй внешний дифференциал всегда равен нулю: d 2 = 0 <\displaystyle d^<2>=0> . Интегральные формулы следуют из (обобщённой) теоремы Стокса.
Использование потенциальных полей в сценарии стратегии реального времени
Реализация поведения юнитов в RTS играх может стать серьезной проблемой. Компьютер, зачастую, контролирует огромное количество юнитов, в том числе и принадлежащих игроку, которые должны передвигаться в большом динамическом мире, попутно избегая столкновения друг с другом, выискивая врагов, защищая собственные базы и координируя атаки для истребления противника. Стратегии реального времени работают в реальном времени, что делает довольно сложным слежение за планированием действий и навигацией.
Этот урок описывает метод планирования течения игры и навигации юнитов, который использует многоагентные потенциальные поля. Он основан на работах под номерами [1, 2, 3]. (Смотри в конце статьи ссылки на используемые материалы)

Что такое потенциальное поле?
Потенциальные поля работают схожим образом — на интересующую позицию в игровом мире кладётся заряд и генерирует поле, которое постепенно сходит на ноль. Заряд может быть притягивающим (положительным) или отталкивающим (отрицательным). Обратите внимание, что в некоторой литературе о потенциальных полях отрицательные заряды притягивающие и наоборот. В этом уроке положительные заряды всегда прятивающие. Рисунок ниже показывает простой игровой мир с некоторой непроходимой территорией (коричневая), вражеского юнита (зелёный) и пункт назначения юнита (Е). Притягивающий заряд расположен в точке назначения.
Заряд генерирует поле, которое распространяется по игровому миру:
И затухает до нуля:
Навигация с помощью ПП
На иллюстрации выше притягивающее поле распространилось вокрут точки назначения «Е». Смысл в том, чтобы позволить зелёному юниту двигаться к позициям с наиболее притягиваемыми значениями и в конце концов найти путь к точке назначения. Чтобы заставить это работать нам также надо разобраться с препятсвиями в игровом мире, в данном случае с горами (коричныевые зоны). Если мы заставим горы генерировать небольшие отталкивающие поля и сложим их с притягивающими полями (с рисунка выше), мы получим результирующее поле, которое может быть использовано для навигации. Так как юниты всегда передвигаются на соседнюю позицию с максимально притягивающим значением, мы обойдем горы, если есть другой путь.
Та же идея используются и для других препятствий. На картинке ниже добавилось еще два своих юнита (белые). Они генерируют небольшие отталкивающие поля, которые снова суммируются с результирующим полем.
Таким образом наш зелёный юнит обойдет эти юниты, чтобы избежать столкновения. Теперь мы получили финальный путь для нашего юнита. Юнит может двигаться из текущей позиции к точке назначения и обойдет все препятствия без использования какого-либо алгоритма поиска пути.
Преимущества использования ПП
Одно из самых главных преимуществ использования потенциальных полей — возможность обрабатывать динамические игровые миры. Так как юниты (агенты) двигаются только по одному шагу за расчёт, вместо генерации полного пути из А в Б, то нет риска, что путь станет недоступен из-за изменений в игровом мире. Поиск пути в динамическом мире может часто быть сложным для реализации и требовать большое количество ресурсов для расчёта. Когда используется подход на основе потенциальных полей, решение проблемы приходит само, автоматически. Конечно нужно быть аккуратным при реализации системы ПП, чтобы не забывать делать обновления потенциальных полей эффективными насколько это возможно. (Об этом чуть позже).
Другое важное приемущество это возможность создавать сложное поведение, просто играясь с настройками формы генерируемых полей. Вместо линейного затухания до нуля мы можем использовать нелинейные поля. Если у нас, например, есть стреляющие юниты вроде танков в нашей армии, мы не хотим чтобы танки предвигались слишком близко к вражеским юнитам, но окружали их на нужной дистанции (например, на расстоянии дальности их стрельбы). Это поведение может быть достигнуто помещением нулевого заряда в точке нахождения вражеского юнита, генерирующего увеличивающеся поле с наиболее притягиваемой точкой на дальности стрельбы, а затем угасающее до нуля. Картинка снизу показывает пример с двумя танками (зелёные), движущимися в атаку на вражеского юнита (красный), генерирующему нелинейное ПП.
Пример уравнения, как такое поле может быть сгенерировано:
Здесь W1 — значение для изменения относительной силы поля. D — максимальная дальность стрельбы и R — максимальная дальность обнаружения (откуда наш агент видит вражеского агента)
Другое поведение, которое легко реализовать это «пнул-убежал». Сперва юнит подходит на максимальное расстояние атаки.
Во время фазы отступления все вражеские юниты генерируют сильное отталкивающее поле с радиусом максимальной дальности стрельбы юнита. Это пример того, как специфичные потенциальные поля могут быть активными или неактивными в зависимости от внутреннего состояния агента, контроллирующего данного юнита. Неактивное поле просто игнорируется, когда суммируется результирующее потенциальное поле.
Картинка ниже — скриншот нашего бота, основанного на ПП для ORTS engine. Левая сторона изображения это 2D вид текущего состояния игры. Оно показывает наши танки (зеленые круги), идущие атаковать вражеские базы (красные квадраты) и юниты (красные круги). Коричневые и черные зоны — непроходимая территория (горы). С правой стороны изображения показано потенциальное поле этого состояния игры. Как и на других картинках из этого урока, голубые зоны наиболее притягивающие. Светлые линии — атаки наших танков. ПП-представление четко показывает как наши юниты окружают врага на максимальной дистанции выстрела, в то же время избегая столкновений друг с другом и местностью. Поведение окружения врага работает отлично и было, возможно, одним из ключевых в нашем успехе 2008го года на ORTS tournament.

Пока мы разрабатывали нашего бота для ORTS, мы обнаружили одну вещь — совершенно иное поведение, когда суммирование потенциалов вражеских юнитов, сгенерированных в каждой точке сравнивалось с просто наиболее высоким потенциалом вражеского юнита в этой точке. На рисунке ниже потенциалы, сгенерированные тремя вражескими юнитами просуммированы и добавлены к результирующему полю. Таким образом наибольший потенциал оказывается прямо в центре вражеского кластера юнитов (обведено красным) и наши юниты очень стремились атаковать врагов в их самых сильных точках.
Решение было не суммировать потенциалы, но вместо этого брать наибольший потенциал в точке от всех юнитов. В последнем случае наиболее высокий потенциал вокруг врагов на допустимом расстоянии (показан красными линиями).
Заметки о реализации
С хорошим планом и реализацией ПП системы, затраты ресурсов на рассчёт не превысят традиционных решений на основе алгоритма А*. Наш ORTS бот использовал наименьшее количество ресурсов ЦП в сравнении с двумя другими ботами, работающими на алгоритмах поиска пути, с турнира 2007-го года. Однако, мы отметим, что сложно точно посчитать использование ЦП, из-за того, что побеждающий бот использует больше ресурсов в конце игры, так как у него остаётся больше юнитов под контролем. Многопоточность также усложняет задачу подсчета требуемых ресурсов ЦП. Сравнение было проведено путём сравнивания общего количества ресурсов ЦП, использованных каждым клиентским процессом в среде Линукса в течение 100 игр. По крайней мере мы можем сделать вывод, что бот был хорош в рамках выделенного времени в 0.125 сек, используемому в ORTS.
Мы эксперементировали с двумя основными архитектурами для генерации ПП…
Пре-генерация
Поле, генерируемое каждым типом объекта было заранее рассчитано и хранилось в статических массивах в заголовочном файле. Во время выполнения программы эти поля просто добавлялись к общему ПП на нужной позиции. Чтобы сделать это возмоным игровой мир был поделен на тайлы, в нашем случае каждый тайл состоял из 8х8 точек игрового мира. Этот подход показал недостаточную детализацию и бот выступил плохо (2007 год турнира ORTS). Так как игровой мир был поделен на значительно большие тайлы, мы сталкивались с проблемами решения того, какой тайл (какие тайлы) объект занимает. Предположим объект (оранжевый круг) и база (оранжевый квадрат). Какие тайлы (серые квадраты) занимает наш зеленый юнит и какие тайлы должна занимать база?
Этот подход может подойти для игр типа Wargus, которые используют менее детализированную тайловую навигационную систему.
Вычисления в реальном времени
А что с проблемой локального оптимума?
Одна из наиболее обычных проблем с ПП это проблема локального оптимума. На картинке снизу пример когда это проблема появляется. Пункт назначения «Е» генерирует круговое поле, которое блокируется горой. Юнит двигается к позициям с наиболее высокими потенциалами и заканчивает на самом большом, где он в данный момент и стоит. Юнит застрял.
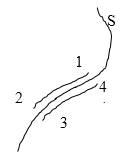
Мы решили это использованием следа, схожего со следом феромонов, описанном в [4]. Каждый агент, контроллирующий юнит, добавляет след в последних N позициях, посещенных юнитом, а также в текущую позицию юнита. След генерирует легкий отталкивающий потенциал и «толкает» юнит вперёд. Смотрите как след толкает юнита вокруг локального оптимума (желтая линия) и юнит может найти путь к точке назначения.
Но даже со следами остаётся риск, что юнит застрянет в ситуациях, подобных той, что на картинке ниже.
Такое можно решить путём заполнения пустот:
Заключение
Ниже мы составили критику против решений, основанных на ПП с нашей точки зрения:
У ПП есть проблемы вроде локального оптимума, которые сложно решить. С использованием следа большинство локальных оптимумов могут быть решены. У ПП проблемы на очень сложной местности, в этих случаях себя лучше показывают методы поиска пути. Сила ПП в обработки больших динамичных миров с большими открытыми пространствами и наименее сложной местностью. Это случай для многих RTS-игр сегодняшних дней.
Решений на базе ПП требуют много ресурсов. Мы в своей работе показали, что решения на базе ПП могут быть реализованы с такой же или даже лучшей эффективностью как и методы поиска пути. Эффективность может быть проблемой, но в этих случаях чаще подходят случаи поиска пути.
Основанные на ПП решения сложны для реализации и настройки. ПП могут быть реализованы с очень простой архитектурой. Настройка может быть сложной и времязатратной, но относительная важность между полями была бы тут кстати (например что важнее уничтожить базу или юнитов?). Графическое представление ПП тоже очень ценно.
Ссылки
Using Multi-agent Potential Fields in Real-time Strategy Games
Johan Hagelbäck and Stefan J. Johansson
International Conference on Autonomous Agents and Multi-agent Systems (AAMAS), 2008.
1. Скачать PDF
The Rise of Potential Fields in Real Time Strategy Bots
Johan Hagelbäck and Stefan J. Johansson.
Proceedings of Artificial Intelligence and Interactive Digital Entertainment (AIIDE), 2008.
2. Скачать PDF
A Multiagent Potential Field-Based Bot for Real-Time Strategy Games
Johan Hagelbäck and Stefan J. Johansson
International Journal of Computer Games Technology, 2009.
3. Скачать PDF
Learning Human-like Movement Behavior for Computer Games
C. Thurau, C. Bauckhage, and G. Sagerer
International Conference on the Simulation of Adaptive Behavior (SAB), 2004.
4. Скачать PDF


